ЛАБОРАТОРІЯ АВТОМАТИЗОВАНИХ ЛОГІСТИЧНИХ СИСТЕМ
Аспіранти:
Клименко Олександр Миколайович (151 спеціальність, 2 курс)
Тема: Моделі та методи керування автономною робототехнічною транспортною системою фармацевтичного виробництва
Вжеснєвський Максим Олегович (151 спеціальність, 2 курс)
Тема: Інтелектуальна підтримка прийняття рішень керування багатоярусними транспортними засобами-шаттлами
Автоматизована конвеєрна лінія для сортування фірми KAPELOU – це комплексне технологічне обладнання, яке дозволяє сортувати різні об’єкти (наприклад, коробки, пакети, пляшки) за QR-code. Конвеєрна лінія для сортування складається з: конвеєрна стрічка, механізми сортування, датчики та програмне забезпечення для керування всією системою, зараз іде розробка та дослідження системи коп’ютерного зору. Датчики, розташовані на конвеєрній стрічці, зчитують інформацію про кожен об’єкт і передають її в програмне забезпечення системи сортування. Залежно від заданих параметрів сортування програма приймає рішення про те, яким чином потрібно сортувати кожен об’єкт.
Механізми сортування складається з вертикального ліфта, який піднімає упаковку на необхідний рівень для подальшого транспортування. Вони керуються програмним забезпеченням з шкафу керування та направляють об’єкти на відповідні лінії сортування. Важливою характеристикою конвеєрної лінії для сортування є її продуктивність. Вона визначається швидкістю конвеєрної стрічки та кількістю об’єктів, які система може обробити за одиницю часу.



ЛАБОРАТОРІЯ АВТОМАТИЗАЦІЇ ВИРОБНИЦТВА ТА РОБОТОТЕХНІКИ
Аспіранти:
Мордик Олександр Олександрович (151 спеціальність, 4 курс)
Тема: Проектування виробничих процесів шляхом передачі навичок та досвіду від людини до робота
Коробський Владислав Васильович (151 спеціальність, 3 курс)
Тема: Інтелектуальна підтримка прийняття рішень при керуванні робототехнічними пневматичними маніпуляторами широкого призначення
Макаренко Геннадій Сергійович (151 спеціальність, 1 курс)
Тема: Моделі та методи інтелектуального керування мобільними роботами в гнучких інтегрованих системах
Festo Robotino – це мобільний робот, розроблений компанією Festo, призначений для автоматизації логістичних процесів у промисловості та освітніх установах. Він має компактний розмір та легко маневрує в обмеженому просторі завдяки колісній платформі. Робот оснащений різними датчиками, такими як лазерний сканер, камера та сенсори дотику, що дозволяє йому орієнтуватися у просторі та виконувати різні завдання. Крім того, він може використовувати систему маркування на підлозі для навігації за певним маршрутом.
Festo Robotino постачається з програмним забезпеченням, яке дозволяє керувати ним та налаштовувати його поведінку для виконання конкретних завдань. Він може бути інтегрований у різні системи автоматизації, такі як конвеєрні лінії, системи складування та ін.
Робот може виконувати безліч завдань, таких як сортування та переміщення вантажів, подання матеріалів на виробничу лінію, піккінг та упаковка товарів та багато іншого.

Робот із шістьма колесами та системою комп’ютерного зору – це робот, який оснащений шістьма колесами для пересування та системою комп’ютерного зору для отримання інформації про навколишнє середовище. Робот використовує свої шість коліс для пересування в будь-якому напрямку, включаючи повороти на місці та рух убік. Це дозволяє роботу маневрувати в тісних просторах та переміщатися по нерівній поверхні, що робить його ідеальним для роботи на складах, виробничих цехах та інших місцях, де потрібна мобільність та маневреність. Система комп’ютерного зору робота включає камери, сенсори і спеціальне програмне забезпечення для обробки інформації. За допомогою цієї системи робот може отримувати інформацію про своє оточення, наприклад, про відстань до об’єктів, їх форму та розташування, а також про перешкоди на своєму шляху.

Проведення досліджень з отримання даних за допомогою розробленої системи комп’ютерного зору для робота Festo.


Лабораторія адитивних технологий та 3D прототипування
Аспіранти:
Стрілець Роман Євгенійович (151 спеціальність, 2 курс)
Тема: Методи та засоби забезпечення якісних показників автоматизованих систем керування адитивними технологіями 3D друку
Близнюк Данило Сергійович (151 спеціальність, 2 курс)
Тема: Методи та засоби оперативного контроля в процесі керування адитивним виробництвом за технологією 3D друку
Баданюк Ігор Олександрович (151 спеціальність, 3 курс)
Тема: Автоматизація процесу керування багатопотоковим виробництвом на основі технології 3D прототипування
Нікітін Дмитро Олександрович (151 спеціальність, 3 курс)
Тема: Автоматизація технологічних процесів виготовлення зображення топології друкованих плат за технологію SLA та DLP
Для проведення екскрементів по дисертації разом з колегами аспірантами Д.О. Нікітіним, Д.С. Близнюком та Р.Е. Стрілцем разом з ас. Д.В. Гуріним, доц. Е.А. Разумовим-Фризюком, було розроблено макет для фотополімерного 3D- друку по технології LCD.
 | 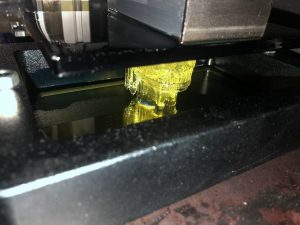 |
Також були розроблені додаткові макети для зборки та досліджень, а саме:
– два 3D принтери за технологією FFF;
– лазерний гравер;
– комбінований ЧПК верстат для 3D-друку, лазерного та фрезерного гравіювання.
 |  |  | 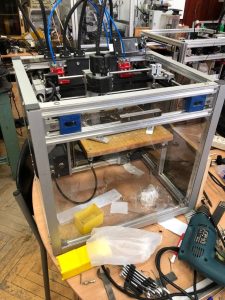 |
На основі даного обладнання планується розробити автоматизований ЧПУ верстат для виготовлення топології односторонніх та двохстороніх друкованих плат (ДП) на базі адитивних технологій фотополімерного друку за принципом DLP засвічування.
Даний прилад буде включати в себе:
– СТЗ для контролю геометричних розмірів отриманої топології; – систему пост обробки заготівок після виготовлення;
– можливість включення в верстата в автоматизовану лінію виробництва.
Програмна частина верстата буде включати себе:
– базу даних розробленню на основі регресійно-кореляційної моделі впливу параметрів експонування на відхилення розмірів;
– порівняльний блок отриманого та бажаного зображення топології;
– блок керування верстатом;
– програма для адаптації зображення топології під даний методу виготовлення ДП.
 | Вітаємо з успішним складанням вступних іспитів здобувачів ступеню Ph.D. зі спеціальності 174 Автоматизація, комп’ютерно-інтегровані технології та робототехніка: Гуртового Олега, Запорізького Валентина та Голода Ігоря та зарахуванням на навчання за третім (освітньо-науковім) рівнем на кафедру КІТАМ (наказ на зарахування). Колектив кафедри під керівництвом проф. Невлюдова І.Ш. бажає здобувачам наукового натхнення та успіху у навчанні/ |